HUBO╩ŪĒnć°┐ŲīW╝╝ągį║Ż©KAISTŻ®čą░lĄ─╚╦ą╬ÖCŲ„╚╦ĪŻĒnć°┐ŲīW╝╝ągį║Ż©KAISTŻ®╩Ūę╗╦∙Ēnć°┤¾īWŻ¼┐ŲīWĪó╣ż│╠┼c╝╝ągĮ╠
ė²LŽ╚ĪŻHUBO╩ŪKAISTŲņŽ┬╚╦ą╬ÖCŲ„╚╦蹊┐ųąą─ HUBO Labčą░lĄ─ÖCŲ„╚╦Ż¼įńšQ╔·ė┌2004─ĻŻ¼ė╔Į╠╩┌Jun-Ho Ohų„│ųķ_░lĪŻ
2012─ĻŻ¼HUBO LabłFĻĀ░l▓╝┴╦ė├ė┌│÷╩█Ą─HUBO 2ĪŻ▓╗═¼ė┌═¼Ų┌┤¾▓┐Ęų╚╦ą╬ÖCŲ„╚╦Ū³Žźąąū▀Ą─ū╦ä▌Ż¼HUBO 2─▄ē“ęįų▒═╚ æBąąū▀Ż¼Ė³ĮėĮ³╚╦Ą─▓ĮæBŻ¼▀@╩Ūę╗éĆĘŪ│Ż┤¾Ą─▀M▓ĮĪŻĮžų┴2013─Ļ7į┬Ż¼ęčėą12┼_HUBO 2│÷┐┌ĄĮ├└ć°Īó║═ą┬╝ėŲ┬Ą─
┤¾īWĪó蹊┐ÖCśŗ║═╣½╦ŠŻ¼ė├ė┌ÖCŲ„╚╦╝╝ąg蹊┐ĪŻ
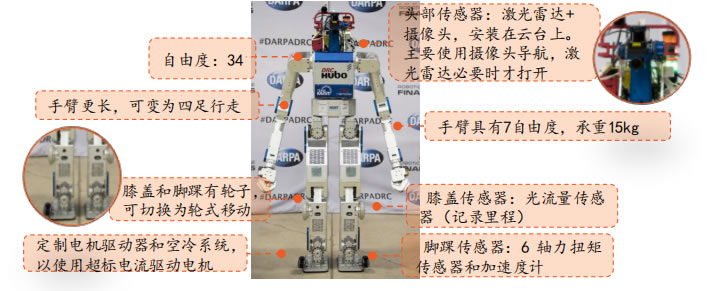
2013─Ļ7į┬Ż¼HUBO LabłFĻĀą¹▓╝═Ų│÷ą┬ą═╠¢HUBOŻ¼ĘQ×ķDRC-HUBOŻ¼īŻ×ķģó┼cDARPAÖCŲ„╚╦╠¶æ┘ÉŻ©DARPA Robotics
Challenge Ż¼DRCŻ®įOėŗĪŻ╦³ōĒėąĖ³ķLĄ─╩ų▒█║══╚Ż¼┐╔ęįį┌ļpūŃĪó╦─ūŃąąū▀║═▌å╩ĮŪ░▀Mų«ķgŪąōQŻ╗╚½╔Ēėą34éĆūįė╔Č╚Ż¼ū¾Īó
ėę╩ųĘųäeėą3Īó4éĆ╩ųųĖŻ¼┐╔ęį▓┘┐vĘĮŽ“▒PĪó┼╩┼└╠▌ūėĄ╚ĪŻ2015─ĻŻ¼DRC-HUBO│¼▀^Atlas┌AĄ├┴╦DARPAÖCŲ„╚╦╠¶æ┘ÉG▄ŖĪŻ
▓©╩┐ŅDäė┴”╣½╦Šų┬┴”ė┌čą░lŠ▀ėąņ`╗Ņ▀\äė─▄┴”Ą─ČÓūŃÖCŲ„╚╦,ų„ę¬░³└©╦─ūŃÖCŲ„╣ĘSpotŻ©ė├ė┌╣żśIč▓ÖzĄ╚ł÷Š░Ż®║═ĦÖCąĄ▒█Ą─ęŲäėÖCŲ„╚╦Stretch
Ę┬╚╦ÖCŲ„╚╦Ą─ÖCąĄśŗįņ,“īäė║═┐žųŲĄ─Å═ļs│╠Č╚Č╝▀hĖ▀ė┌¼FėąĄ─ÖCŲ„╚╦;īŹ¼Fę╗Č©│╠Č╚Ą─šJų¬║═øQ▓▀ųŪ─▄,╔ąąĶę¬╚╦╣żųŪ─▄▄øė▓╝■Ż©┤¾─XŻ®Ą─Ė▀Č╚░lš╣
Ņ^▓┐╩╣ė├╚²ŅwAutopilot özŽ±Ņ^ū„×ķĖąų¬ŽĄĮy,Left/RightPillarCameraū¾╝ń/ėę╝ńözŽ±Ņ^║═FisheyeCamera ųąčļ¶~č█özŽ±Ņ^,╠ß╣®┤¾ė┌180Č╚¾wŪ░ł÷Š░Ė▓╔w,
CyberOneÖCŲ„╚╦┤Ņ▌dĄ─Mi-Sense╔ŅČ╚ęĢėX─ŻĮM,«aŲĘį┌£y┴┐ĘČć·ā╚Š½Č╚Ė▀▀_1%,ØMūŃ╝ż╣Ō░▓╚½ Class1 ś╦£╩,ōĒėą═Ļš¹Ą─╚²ŠS┐šķgĖąų¬─▄┴”
WALKERX▓╔ė├╗∙ė┌ČÓ─┐ęĢėXé„ĖąŲ„Ą─╚²ŠS┴ó¾węĢėXČ©╬╗,▓╔ Coarse-to-fineĄ─ČÓīėęÄäØ╦ŃĘ©,īŹ¼FäėæBł÷Š░Ž┬╚½ŠųūŅā×┬ĘÅĮūįų„ī¦║Į
Č©╬╗╣”─▄ų„ę¬æ¬ė├ė┌╝ė╣żįOéõ╣żŠ▀Č╦Ą─┬ĘÅĮę²ī¦;╬’┴„ś╦║×ūx╚Ī║═ūųĘ¹ūRäe╩ŪūRäe╣”─▄ūŅų▒ĮėĄ─Ę■äšī”Ž¾;£y┴┐╣”─▄ų„ę¬æ¬ė├ė┌ī”─┐ś╦╬’¾wĄ─Ė▀╦┘ Ė▀Š½£y┴┐
ę╩─ŽŠWĖ±╗»App╩Ūę╩─Ž┐h╔ńĢ■ų╬└Ēą┼ŽóŲĮ┼_Ą─╩ųÖCæ¬ė├,┐╔ęį×ķ╩│ŲĘ╦ÄŲĘ▒O╣▄┤ŅĮ©ą┬─Ż╩Į,š{äėśI╬»Ģ■,╬’śI╣½╦Š,ąĪģ^ŠWĖ±åT,ĮųŽ’ŠWĖ±åTĄ╚ģó┼c╩│ŲĘ╦ÄŲĘ░▓╚½ų╬└Ē
PLC┐žųŲŲ„ė├ė┌łAų▄▀\äė╗“ų▒ŠĆ▀\äėĄ─┐žųŲ;ŪČ╚ļ╩Į┐žųŲŲ„║Ł╔wÅ─║åå╬ĄĮÅ═ļsĄ─Ė„ĘN▀\ė├;ŠWĮj╩Į┐žųŲŲ„┼c╦┼Ę■“īäė ĮyĄ─µ£Įė╩Ū▓╔ė├Ė„ŅÉ╣żśI┐éŠĆą╬╩Į
ųąć°ÖCŲ„ęĢėX╝╝ągį┌╣żśIŅIė“æ¬ė├▌^ČÓ,«aśIĘų▓╝┼cųąć°ųŲ įņśI░l▀_Ąžģ^Ą─Ąž└Ē╬╗ų├┬ōŽĄ▌^Šo├▄,į┌ÅV¢|╩ĪĪóĮŁšŃ£¹Ą╚ Ąžģ^▌^╝»ųą,šQ╔·┴╦ČÓéĆųąć°ÖCŲ„ęĢėX«aśIµ£╔Žųąė╬²łŅ^Ų¾śI
┼cRV╝░Ųõ╦¹Š½├▄£p╦┘Ų„ŽÓ ▒╚,ųC▓©£p╦┘Ų„╩╣ė├Ą─▓─┴Ž,¾wĘe╝░ ųž┴┐┤¾Ę∙Č╚Ž┬ĮĄ;Š½Č╚═∙═∙▓╗╝░ųC▓©£p╦┘Ų„,ę╗░Ńæ¬ė├ė┌ČÓĻP╣ØÖCŲ„╚╦ųąÖCū∙
ųC▓©£p╦┘Ų„╩Ūę╗ĘN┐┐▓©░l╔·Ų„╩╣╚ß▌å«a╔·┐╔┐žĄ─ÅŚąįūāą╬▓©,Ų„Š▀ėąå╬╝ēé„äė▒╚┤¾,¾wĘeąĪ,┘|┴┐ąĪ,▀\äėŠ½Č╚Ė▀Ą╚╠žš„;RV£p╦┘Ų„╩Ū╩Ūą²▐D╩Ė┴┐Ż©Rotary VectorŻ®£p╦┘Ų„Ą─║åĘQ
╚╦ą╬ÖCŲ„╚╦Ą─ÖCąĄśŗįņÅ═ļs│╠Č╚Č╝▀hĖ▀ė┌¼FėąĄ─ÖCŲ„╚╦,Ė∙ō■Ė„▓┐╬╗▀\äėąĶŪ¾śŗĮ©ł╠ąąŠ½Č╚Ė▀Ą─“īäėŽĄĮyķ_░lŠ▀ėąĖ▀Č╚ĘĆČ©ąį║═▀mæ¬ąįĄ─┐žųŲŽĄĮy